A Wearable Gesture-Control Interface Based on Fabric Capacitive Sensors for Emergency-Rescue Exploration Vehicles
Keywords:
smart textiles, fabric sensor, capacitive pressure sensor, wearable interface, human–robot collaboration, emergency rescueAbstract
With the rapid development of flexible electronics, wearable computing, and human–robot collaboration technologies, flexible conductive textiles have become an important research platform for wearable interaction, owing to their excellent flexibility, comfort, and adaptability to diverse application scenarios. They show considerable potential in complex operational contexts, including emergency rescue, industrial collaboration, and specialized hazardous-environment tasks. Although material development and fundamental fabrication techniques for flexible conductive textiles have become increasingly mature, significant research gaps remain in sensor structure innovation for practical operational requirements, the construction of integrated wearable interfaces, and the deep integration of textile sensors into human–robot collaboration systems. Therefore, solutions that combine structural rationality, sensing stability, and practical wearability are urgently needed.
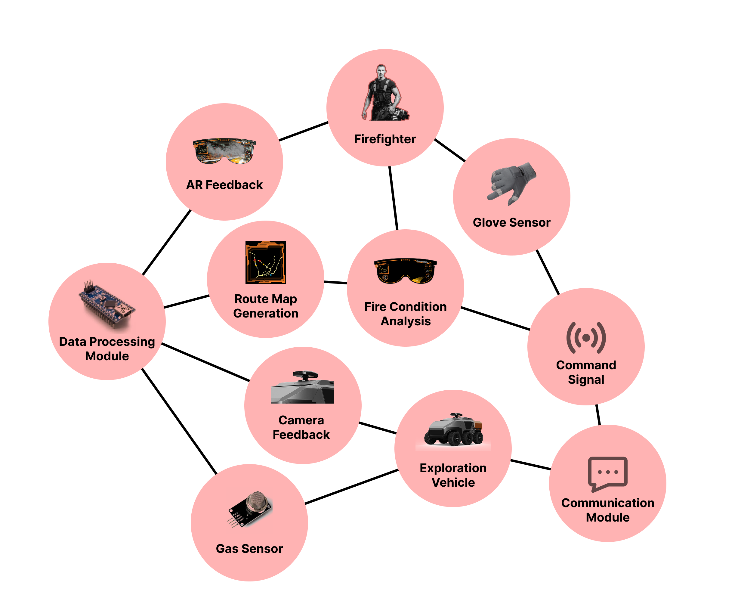
This study proposes a fabric-based capacitive pressure sensor and integrates it into a wearable glove interface for gesture-based remote control of an emergency-rescue exploration vehicle. First, the structure of a textile-based capacitive pressure sensor is investigated by optimizing the configuration of conductive and non-conductive textile layers to improve flexibility, wearability, and sensing response. Second, the selected sensor structure is integrated into a glove interface, where finger-joint bending gestures are mapped to four vehicle movement commands: forward, backward, left turn, and right turn. Finally, the prototype is evaluated through preliminary gesture-control and mobility tests. The user evaluation involved ten participants with mostly design-related backgrounds and focused on gesture-command understanding, control responsiveness, comfort, and ease of learning. The mobility test examined basic vehicle movement across uneven surfaces and low-height obstacles under simple outdoor conditions. The results suggest the preliminary feasibility of using fabric-based capacitive sensors as a wearable gesture-control interface for remote vehicle operation. More comprehensive evaluations in standardized rescue-simulation environments remain future work.